People who know me have probably noticed that I have pretty bad handwriting skills. I recently realized that apparently there is a pretty scary word for my case: dysgraphia. Fortunately I was growing up long enough ago when this word hadn't yet been discovered, so this diagnosis did not affect my life. There were probably even a few times I benefited from it when my teachers couldn't figure out my scrawls and assumed that I was trying to write something profound.
Once upon a time when I was struggling to write something on the whiteboard and my colleagues were trying to read my hen-tracks I realized that I just need a whiteboard robot to help me.
My first idea was to build something like a plotter on the wall: two vertical slides on the side of the board and horizontal slide with dry-erase marker:

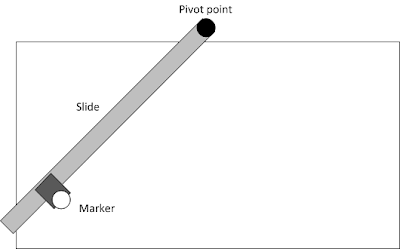
Well, this looked way too complicated. So I decided to simplify it: make it a polar coordinated plotter - a pivoted bar mounted top-center with a marker sliding along the bar:
Luckily, before I began my adventure I decided to use my favorite search engine to double-check whether anyone else was doing something similar (I am so unique so I must be the only one who ever thought about it, like ever).
Well, unfortunately I am not that original. There are quite a few similar projects and they found even easier ways of doing it:

Yes, this thing (beaded cord). You usually pull it down to turn lamp on/off or to open/close blinds. So instead of having rigid slides they are using flexible cords to position the gondola with the marker:

At this point I should probably have just shamed myself and stopped thinking about the drawing robot since it already existed and I didn't even have any plans to improve it. However, I liked the idea so much that I decided to make a replica of such a machine.
After digging a little through similar projects I found the awesome one - Polargraph. It's an open-source project, well developed and based on the popular Arduino platform which I am already familiar with. I didn't want to spend much time on it, so decided to rig something simpler.
I started with beaded cord which I got from a local hardware store. Based on the size of the balls and links between them I printed two spools on DMC's 3D Printer and mounted the spools to the shafts of the stepper motors. The rest was supposed to be simple: just grab a motor driver board - Motor Shield, dremel a gondola (old CD), hot-glue an RC servo to lift the pen off the whiteboard, program Arduino with the Polargraph code and ... realize that my motors are not compatible with Motor Shield.
The problem was my motors are pretty standard NEMA 17 steppers with very low internal resistance and designed to be driven by a special driver. This driver is supposed to measure a motor current and disconnect the power source when the current reaches a limit. The current starts decreasing and the driver turns the power source back on with this on/off show repeating 20000 times a second or so. Since the Motor Shield is pretty dummy it doesn't have a current feedback, so it would just turn on full power, overheat, and set itself on fire (haven't tried that, just guessing).
I didn't want to get a proper motor driver, I just wanted something quick. I ended up using a lab power supply to reduce the motor voltage to ~3V which provides enough current for the motors without overheating the Motor Shield.
Note: It's not a good idea in many aspects, primarily because the Motor Shield is based on the L293 chip that has minimum voltage requirements of 4.5V.
Here is a video of one of the first tests:
At this point I didn't want to spend any more time on it and brought my Polargraph to work. Here is another video, drawing DMC logo:
A couple weeks later I got an excellent stepper motor driver - Allegro A4988 and finally got rid of lab power supply and replaced it with an old laptop AC adapter (it has a standard 19.5V DC output). I also had to slightly modify the Arduino code to communicate to the Allergro chip instead of Motor Shield.
Note: Allegro chip is tiny and it's really inconvenient to solder (QFN package, 5x5mm), to save a hassle just get it on the breakout board.
Next steps. I also attempted to make it wireless (between host PC and Arduino), by adding a Bluetooth module to the Arduino side. However, I ran into some issues with how the communication protocol is implemented (it's very sensitive to delays). Maybe I'll improve it later.
Happy drawing!
Learn more about DMC's embedded development and embedded programming services.